 日本語
日本語








 野立て架台
ÈáéÁ´ã„ŶÊû∂Âè∞ ±ãÊÝπÊû∂Âè∞
±ãÊÝπÊû∂Âè∞ „Ç´„ɺ„Éù„ɺ„Éà
カーポート シェアリング架台
シェアリング架台 Easy Solar Kit
Easy Solar Kit 追尾型架台
追尾型架台 パワコン
パワコン パーツ品
パーツ品

太陽光発電清掃ロボットの使用に関するガイドライン-B30M2
シンプルで使いやすい太陽光発電掃除ロボット。以下の使用ガイドについて学びましょう。
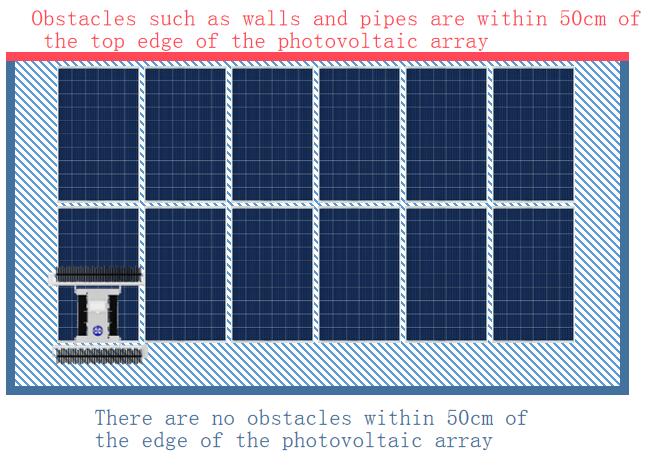
1.サポートされる使用シナリオ
Áü•„Çâ„ÅõÔºö
2.1使用前の確認
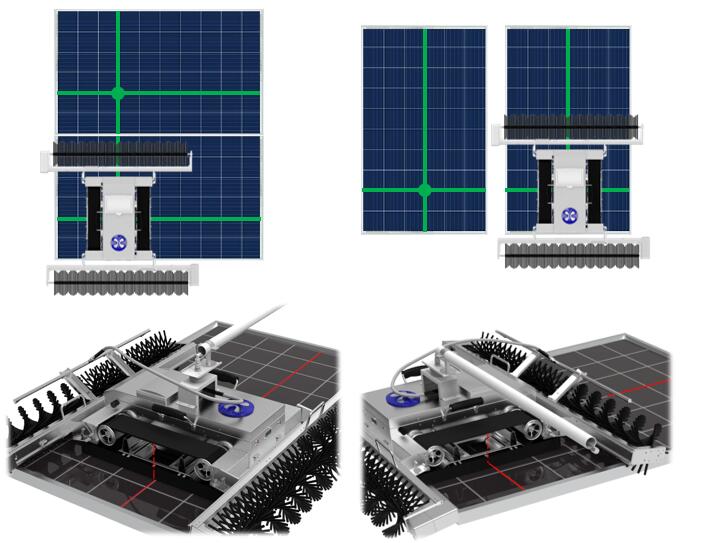
2.1.1„Ç∞„É™„ÉÉ„Éó„ÅƧßÂπÖ„Å™‰Ωé‰∏ã„ÇíÈò≤„Åê„Åü„ÇÅ„Å´„ÄÅ„Éà„É©„ÉÉ„ÇØË°®Èù¢„ÅÆÊ∏ÖÊΩî„Åï„ÇíÁ¢∫Ë™ç„Åó„Ŷ„Åè„ÅÝ„Åï„ÅÑ„ÄÇÔºàÂâçÂæå˪ä˪∏„ÅƧâÂΩ¢„ÇÑÁÝ¥Êêç„ÇíÈò≤„Åê„Åü„ÇÅ„ÄÅ„Éà„É©„ÉÉ„Ç؉∏äÈÉ®„ÅÆÂêä„Çä‰∏ã„ÅíÈÉ®ÂàÜ„ÇíÊåÅ„Å°‰∏ä„Åí„Çã„Åì„Å®„ÅØÁ¶ÅÊ≠¢„Åï„Çå„Ŷ„ÅÑ„Åæ„ÅôÔºâ

2.1.2ËêΩ‰∏ãÈò≤Ê≠¢„Ǫ„É≥„ǵ„ɺ„ÅÆÁï∞Â∏∏„ÇíÈò≤„Åê„Åü„ÇÅ„Å´„ÄÅËêΩ‰∏ãÈò≤Ê≠¢„Ǫ„É≥„ǵ„ɺ„ÅƉ∏ã„Å´Áï∞Áâ©„Åå„Å™„ÅÑ„ÅãÁ¢∫Ë™ç„Åó„Ŷ„Åè„ÅÝ„Åï„ÅÑ„ÄÇÔºà§ñÂäõ„Å´„Çà„ÇãÂúßËø´„ÅØÂé≥Á¶ÅÔºâ

2.1.3セルフクリーニングパールコットンの消耗を確認し、セルフクリーニングパールコットンの側面がトラックに近いかどうかを観察して、トラックのグリップが大幅に低下しないようにします。

2.1.4 中央吸盤アセンブリの吸盤底部の吸着面がきれいであることを確認し、グリップ力が大幅に低下して操作の安全性に影響を与えないようにします。

2.1.5 Èú≤Âá∫„Éú„ÉÉ„ÇØ„Çπ„Å®„Åù„ÅÆ„Éú„ÉÉ„ÇØ„ÇπÊú¨‰Ωì„ÅÆ„Ç´„É°„É© „ɨ„É≥„Ç∫„ÅÆʱö„Çå„ÇíÁ¢∫Ë™ç„Åó„ÄÅÊó•ÂÖâ„ÇфŪ„Åì„Çä„Åå„Ç´„É°„É©„Å´Âπ≤Ê∏â„Åó„Å™„ÅÑ„Çà„ÅÜ„Å´„ÄÅ„Ç∑„Ç߄ɺ„Éá„Ç£„É≥„Ç∞ „Éñ„É©„Ç∑„ÅåÈú≤Âá∫„Éú„ÉÉ„ÇØ„Çπ„ÅÆÊäïÂΩ±Èù¢ÈÝòÂüü„ÇíÂÆåÂÖ®„Ŵ˶܄ţ„Ŷ„ÅÑ„Çã„Åã„Å©„ÅÜ„Åã„ÇíÁ¢∫Ë™ç„Åó„Åæ„Åô„ÄÇ

2.1.6„É≠„ɺ„É©„ɺ„Éñ„É©„Ç∑„Ç¢„Ǫ„É≥„Éñ„É™„ÅÆÁ®ÆÈ°û„Å®„ÄÅ„ÇØ„É™„ɺ„Éã„É≥„Ç∞ÂäπÊûú„Å´ÂΩ±Èüø„Çí‰∏é„Åà„Å™„ÅÑ„Çà„Å܄Ŵ§âÂΩ¢„Åó„Ŷ„ÅÑ„Å™„ÅÑ„Åã„Å©„ÅÜ„Åã„ÇíÁ¢∫Ë™ç„Åó„Ŷ„Åè„ÅÝ„Åï„ÅÑ„ÄÇ

2.2ÂÝ¥ÊâÄ„ÅÆÈÅ∏Êäû
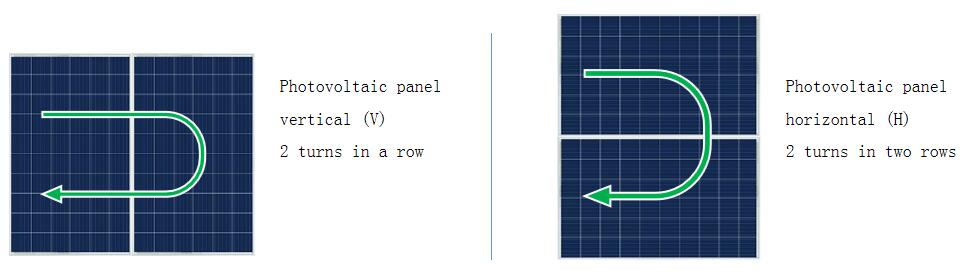
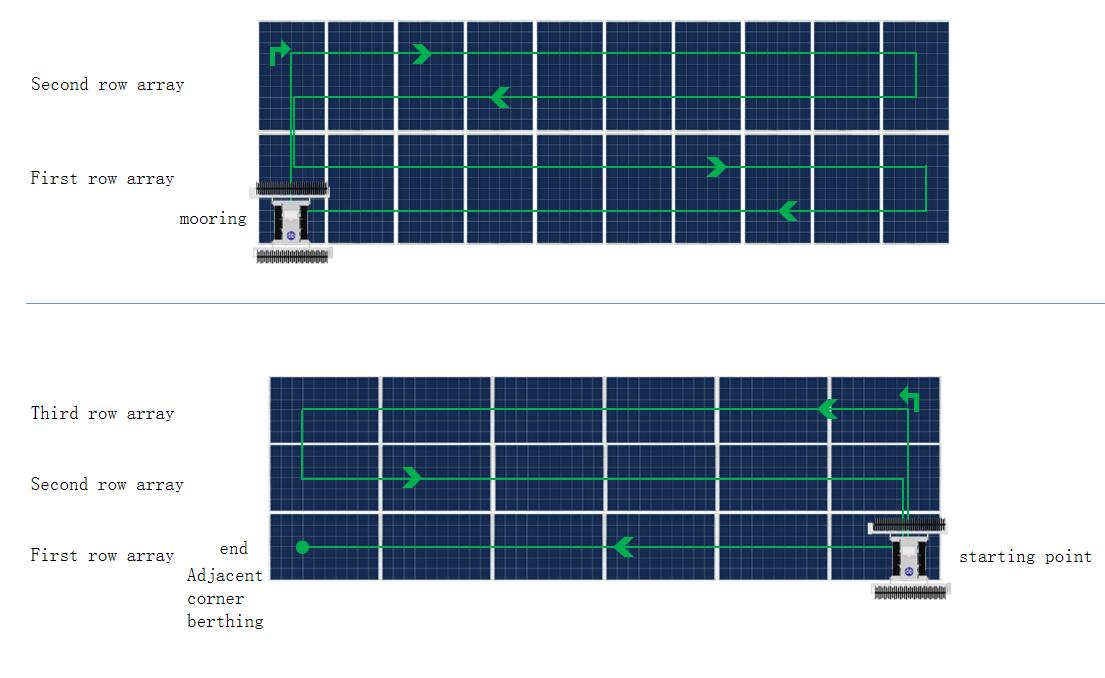
2.2.1 (ターン数) は、(1 行あたりのターン数) に (相対配列行数) を掛けた値に等しくなります。
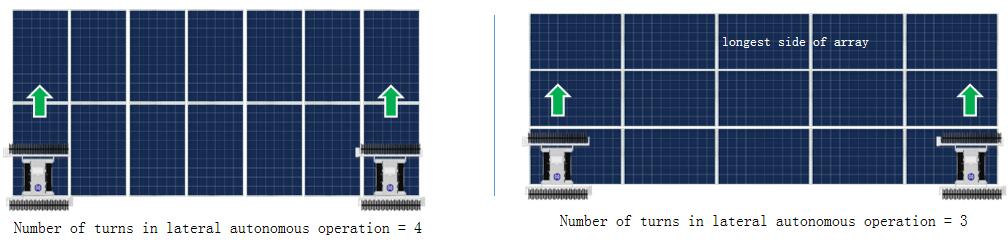
2.2.2 PV アレイの最も長い側 (上) に面するデバイスを開始点として選択し、水平自律動作のターン数を最小限に抑え、効率を最大化できるようにします。
2.2.3 一般に、機器の取り扱いと操作に便利な側が開始端、つまりアレイの下端として使用されます。
2.3起動デバイス
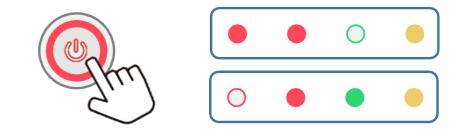
2.3.1電源投入
電源ボタンを押してデバイスを起動し、最初の赤いライトがオフになると、デバイスは正常で初期化状態になります。
2.3.2‰ΩçÁΩÆÊÝ°Ê≠£
デバイスの横方向の中心軸を下隅の 2 行目と 3 行目のセル間の行間隔に合わせて調整し、縦方向の中心軸を下隅の 3 列目と 4 列目のセル間の間隔線に合わせます。下隅。
※同調車の左支持板には中心位置を示す穴位置があり、位置合わせに役立ちます。
2.3.3作業開始
Á∑ëËâ≤„ÅÆ„É©„ǧ„Éà„ÅåÂ∏∏ÊôÇÁÇπÁÅØ„ÄÅ˵§Ëâ≤„ÅÆ„É©„ǧ„Éà„ÅåÂ∏∏ÊôÇÊ∂àÁÅØÔºà„Éñ„Ç∂„ɺ„Åå 1 ÂõûÈ≥¥„ÇãÔºâ„Åó„ÄÅÂàùÊúüÂåñ„ÅåÊàêÂäü„Åó„ÅüÂÝ¥ÂêàÔºàÁ¥Ñ 22 ÁßíÔºâ„ÄÅ„Çπ„Çø„ɺ„Éà/„Çπ„Çø„É≥„Éê„ǧ „Éú„Çø„É≥„ÇíÊ亄Åó„Ŷ„Éá„Éê„ǧ„Çπ„ÇíÁã¨Á´ã„Åó„ŶÂãï‰Ωú„Åï„Åõ„Çã„Åì„Å®„Åå„Åß„Åç„Åæ„Åô„ÄÇ

2.4機能適用
2.4.1自律作業
„Ç∑„ɺ„É≥„ÅÆ„Ç¢„ÇØ„ÉÜ„Ç£„ÉñÂåñ„Å®Ë≠òÂà•„ÅåÂÆå‰∫Ü„Åó„Åü„Çâ„Äŧ™ÈôΩÈõªÊ±Ý„Ç¢„ɨ„ǧ„ÅƉ∏äÈÉ®„Å´Áã¨Á´ã„Åó„ŶÁôª„Çä„ÄÅÊñπÂêë„Çí„ÉÜ„Çπ„Éà„Åó„Åæ„Åô„ÄÇÊñπÂêë„Çíʱ∫ÂÆö„Åó„Åü„Çâ„ÄÅÊ®™ÊñπÂêë„ÅÆÊìç‰Ωú„ÇíÈñãÂßã„Åó„ÄÅÂêë„Åç„Çí§â„Åà„Ŷ„Ç¢„ɨ„ǧ„Åå˶܄Çè„Çå„Çã„Åæ„Åß„Ç¢„ɨ„ǧ„ÅƉ∏°ÂÅ¥„ÇíÊ≠©„Åç„ÄÅÈßê˪ä„É¢„ɺ„Éâ„Å´Âæì„Å£„ŶÁµÇÁÇπ„ÇíÈÅ∏Êäû„Åó„Åæ„Åô„ÄÇ
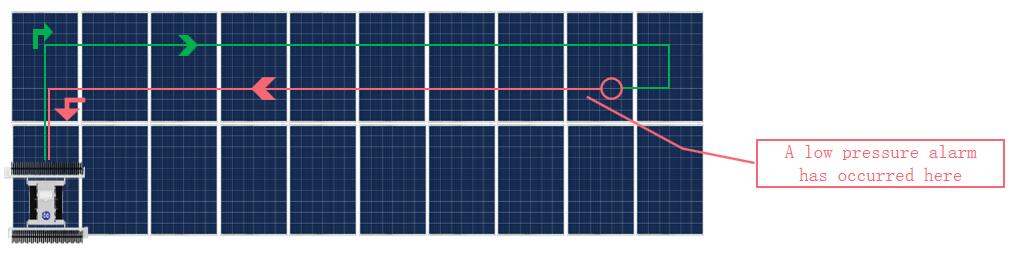
2.4.2 低圧戻り
自律運転中にバッテリー残量が少なくなると、装置は自動的に低電圧原点復帰モードに入り、開始位置に戻ります。
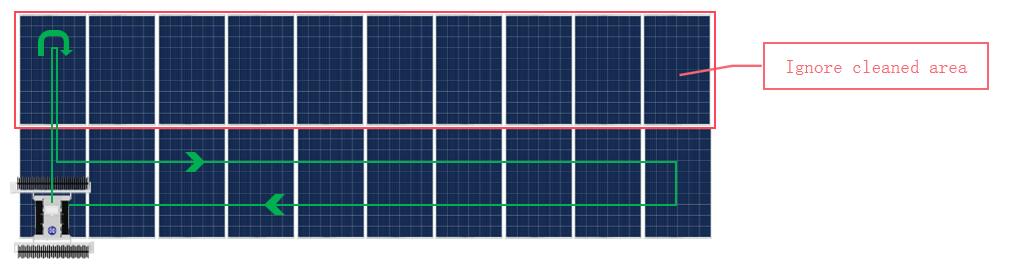
2.4.3ブレークポイント継続
洗浄エリアの一部を個別にスキップすることを選択し、最後の低圧復帰または手動ボタンが操作を中断した位置を見つけ、そこから操作を続行します。
Áü•„Çâ„ÅõÔºö
2.5.1基本的な相互作用
デバイスのステータス表示とモードのカスタマイズ設定。

2.5.2リモコンモード
デバイスを手動で制御するためのジョイスティックおよびボタン モード
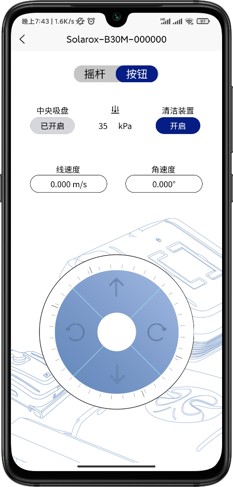
※リモコンモードは本体を基準座標系とするヘディングモードです。
* 地理的またはオペレーター参照座標系を使用したヘッドレス モードの代わりに。

カテゴリ
新しいブログ
Ë£ΩÂìÅ„Çщæ°Êݺ˰®„Å´Èñ¢„Åô„Çã„ÅäÂïè„ÅÑÂêà„Çè„Åõ„ÅØ„ÄÅ24ÊôÇÈñ쉪•ÂÜÖ„Å´„ÅîÈÄ£Áµ°„ÅÑ„Åü„Åó„Åæ„Åô„ÄÇ
 RM502, Sihai Smart Zone, No.189, Fanghu West Road, Huli District, Xiamen, Fujian, China.
RM502, Sihai Smart Zone, No.189, Fanghu West Road, Huli District, Xiamen, Fujian, China.





© 著作権: 2026 Xiamen Wintop New Energy Tech Co., Ltd.. 全著作権所有.

サポートされているIPv6ネットワーク



